SLAM
B03902035 黃兆緯
B03902074 陳耘志
B03902082 江懿友
Abstract
Enable GPU optimizations to achieve real time SLAM on the Jetson TX1 embedded computer.
SLAM = Simultaneous Localization And Mapping
TX1 devboard:

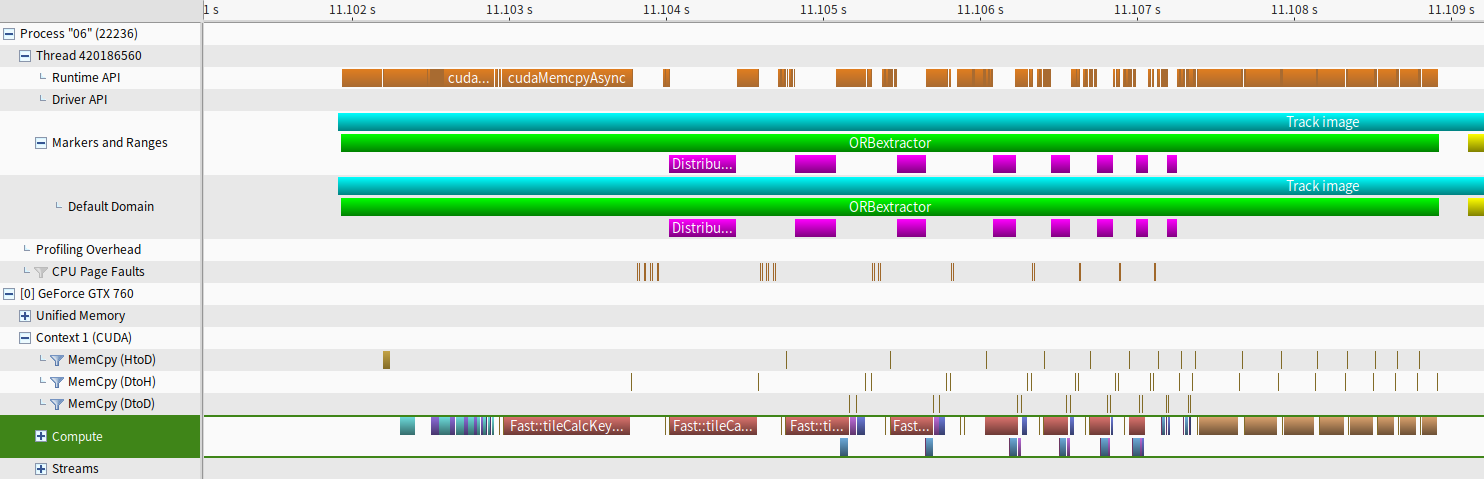
Main hotspots
Corner detection on images
Feature extraction on images
What we've done
Reimplement "Fast corner detection" and "ORB feature extraction" with CUDA
Pipeline GPU kernels as much as possible
Overlap unparallelizable CPU work and GPU work as much as possible
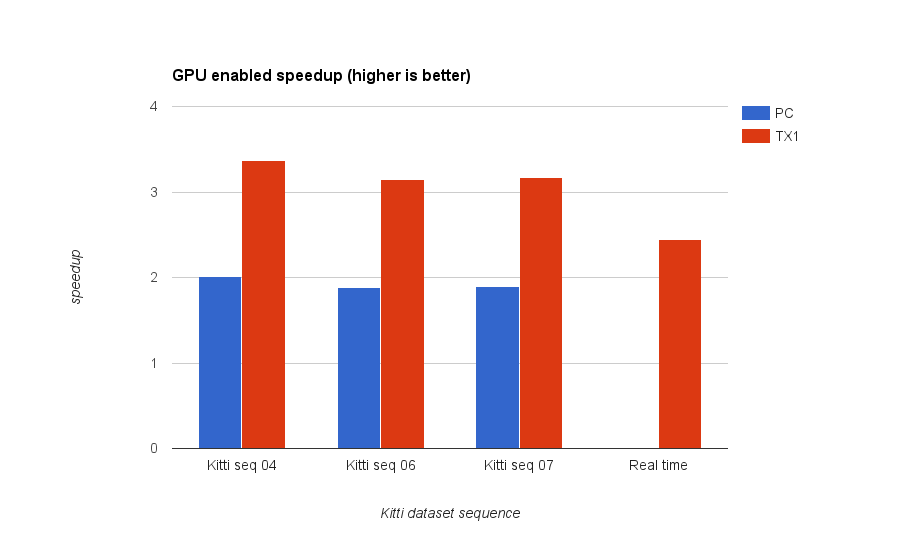
Results
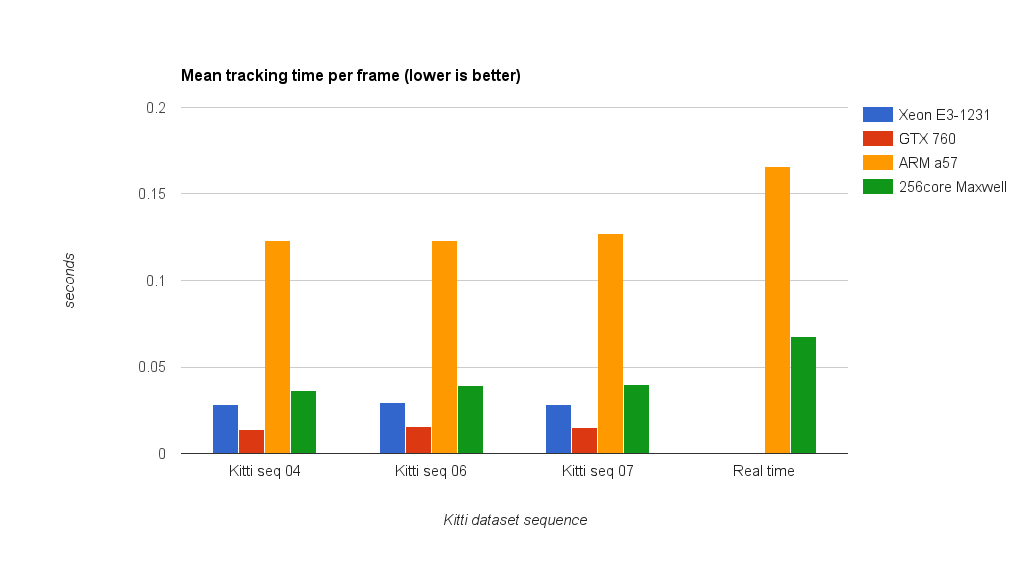
Platforms:
PC (Xeon E3 1231 / GTX 760 Kepler)
TX1 devboard (ARM A57 / 256 core Maxwell)
Mean tracking time per frame
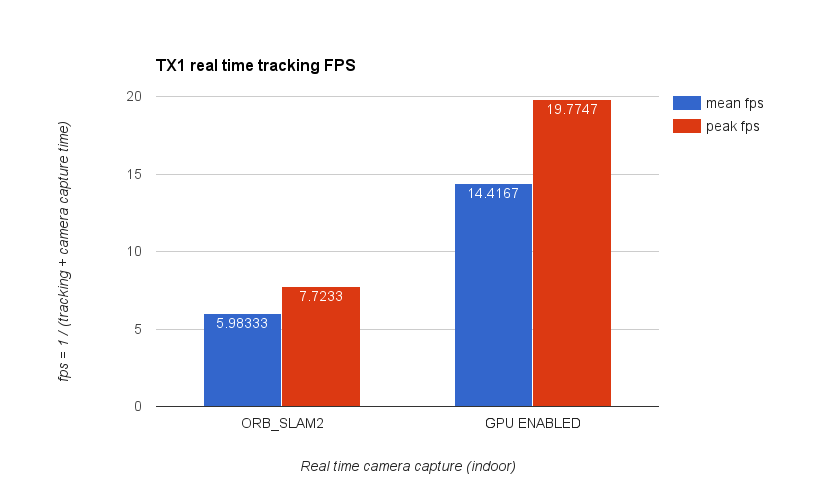
Mean and peak fps
Speedups